Human-centric Autonomous Driving in an AV-Pedestrian Interactive Environment Using SVO

Abstract
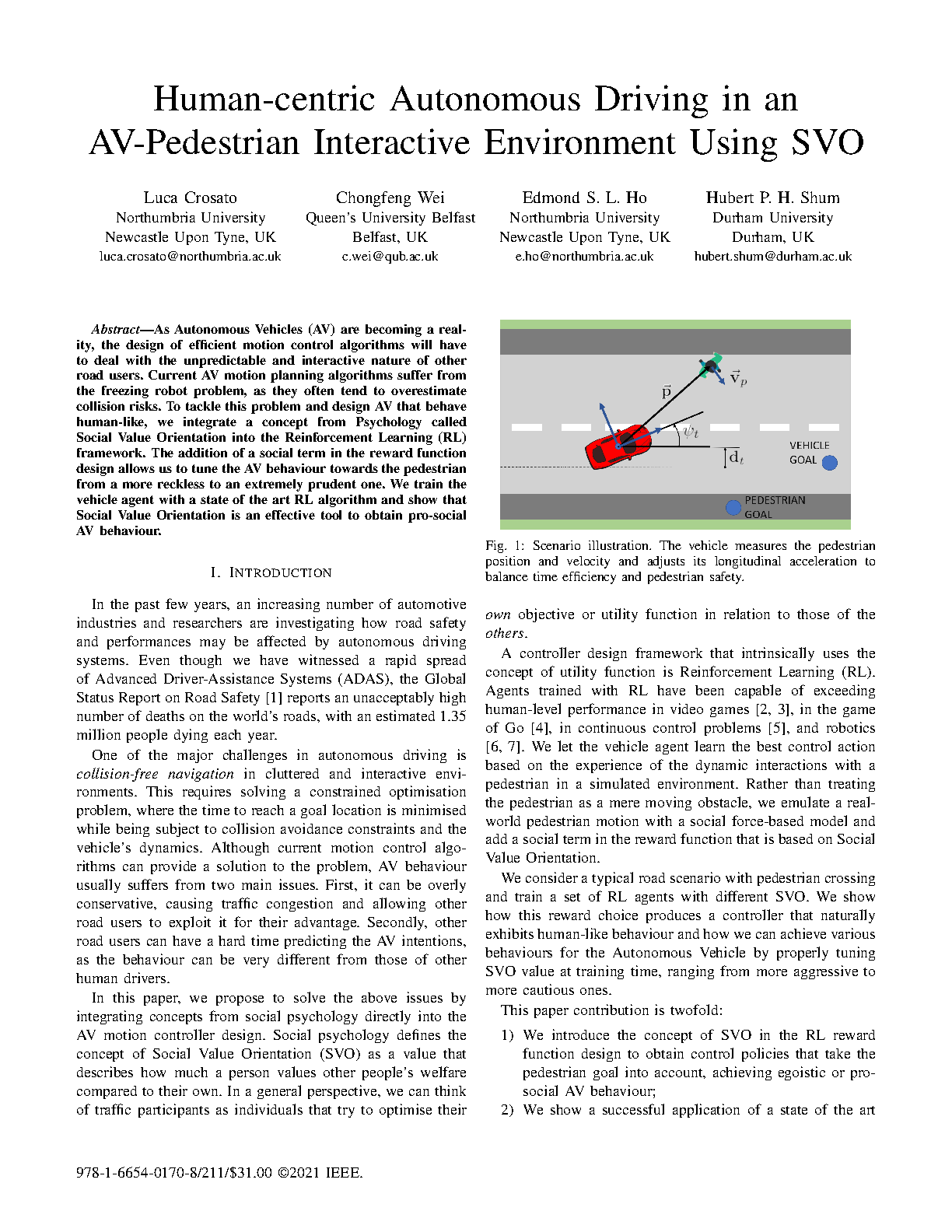
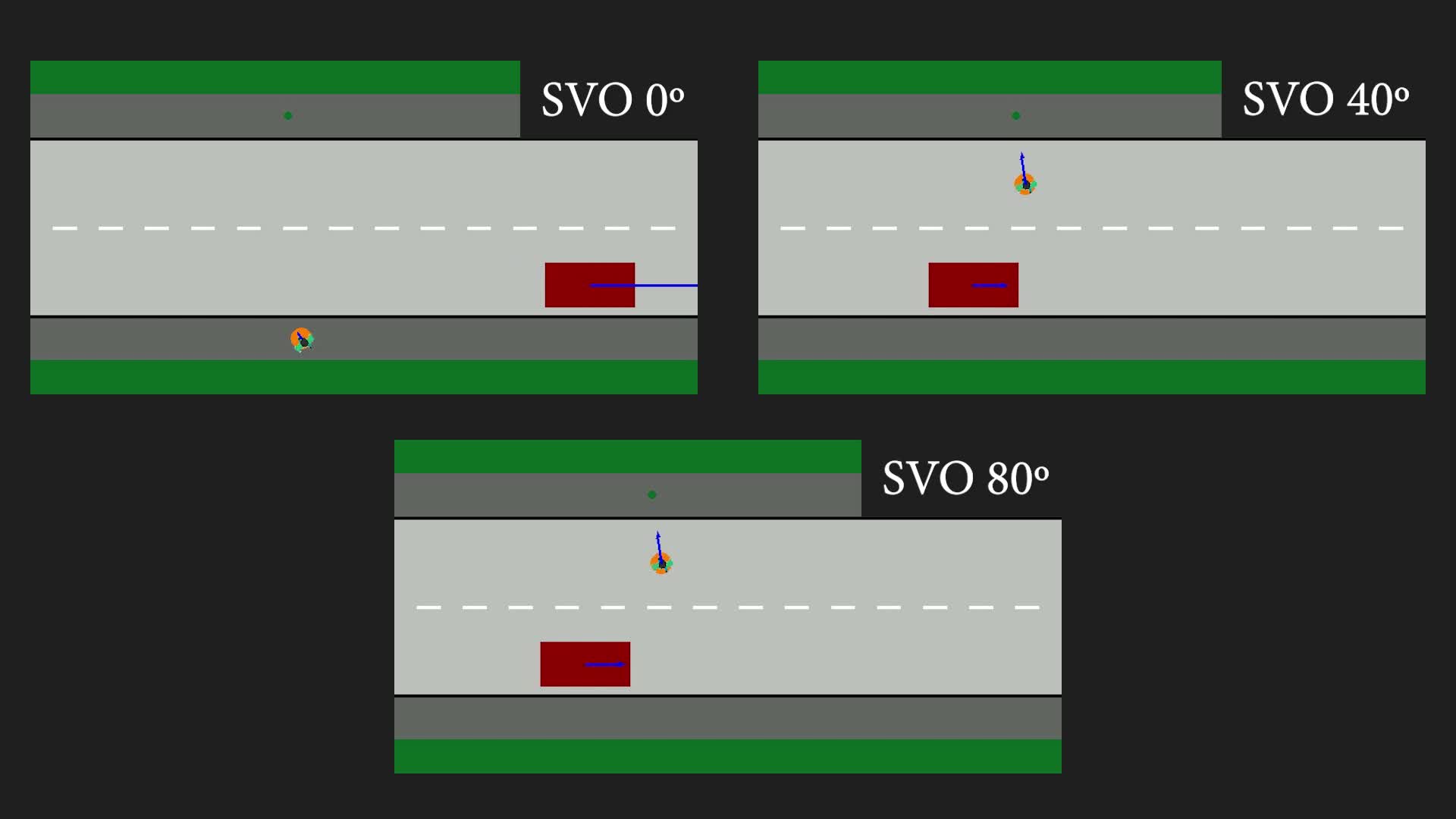
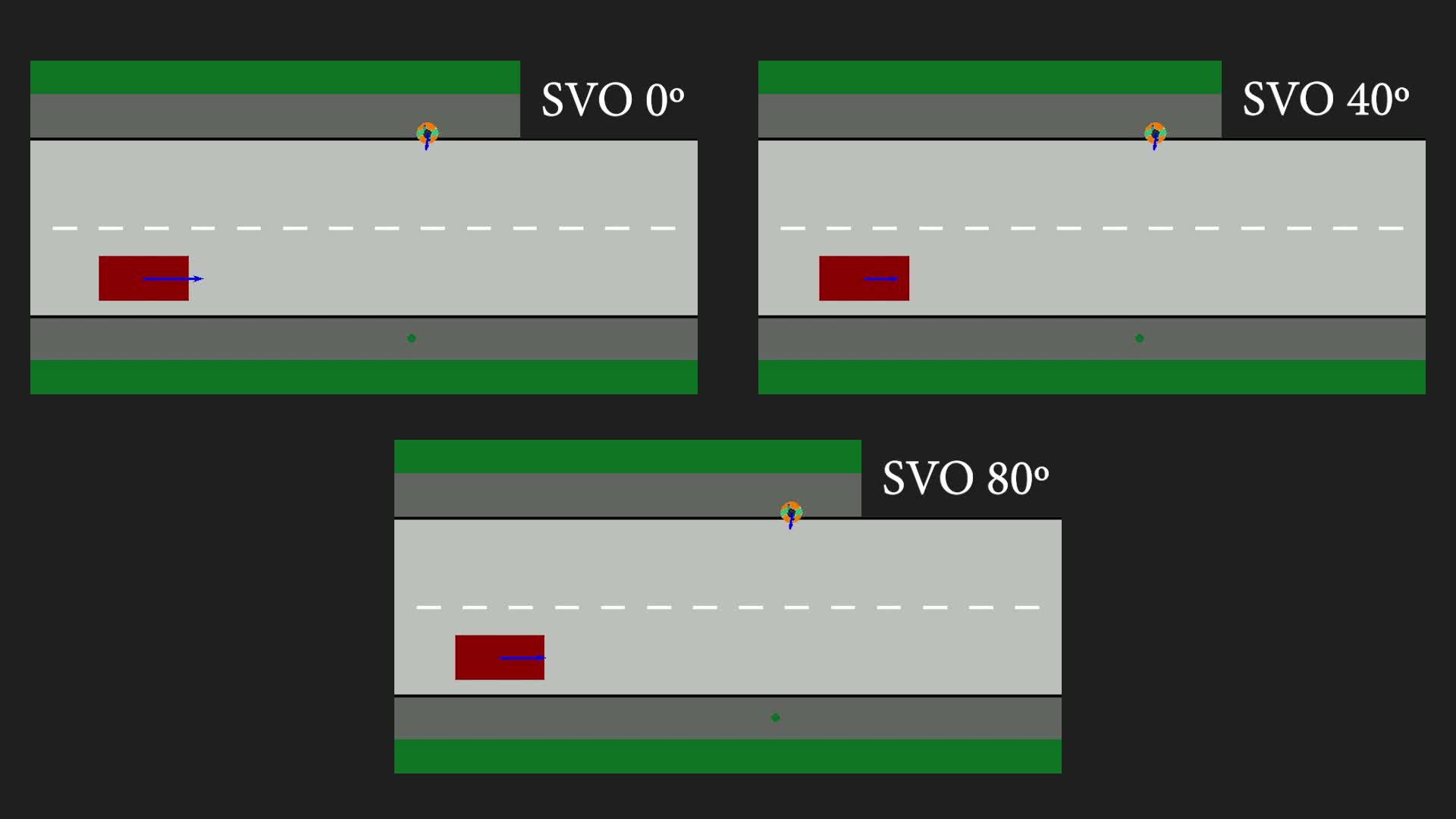
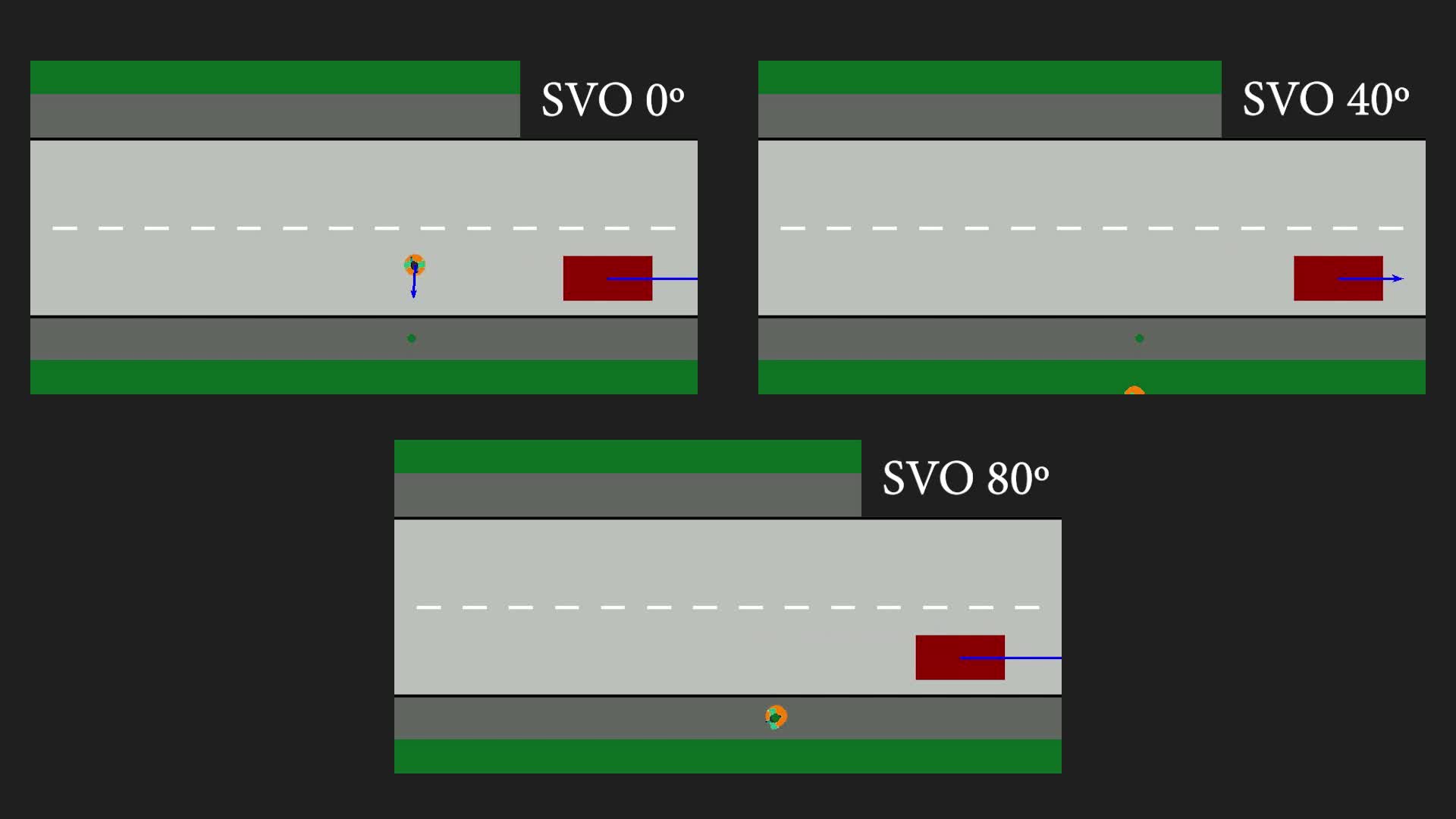
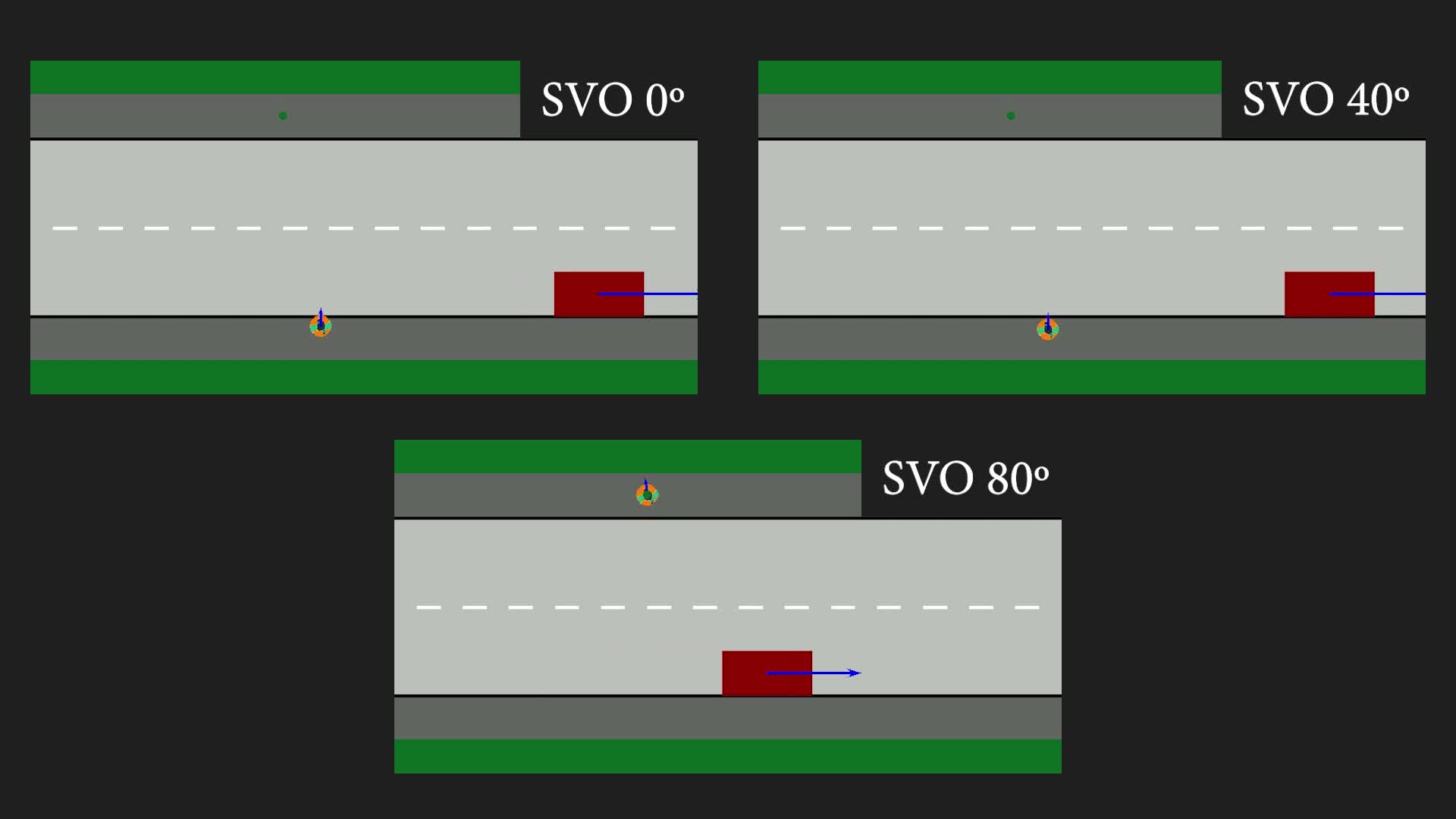
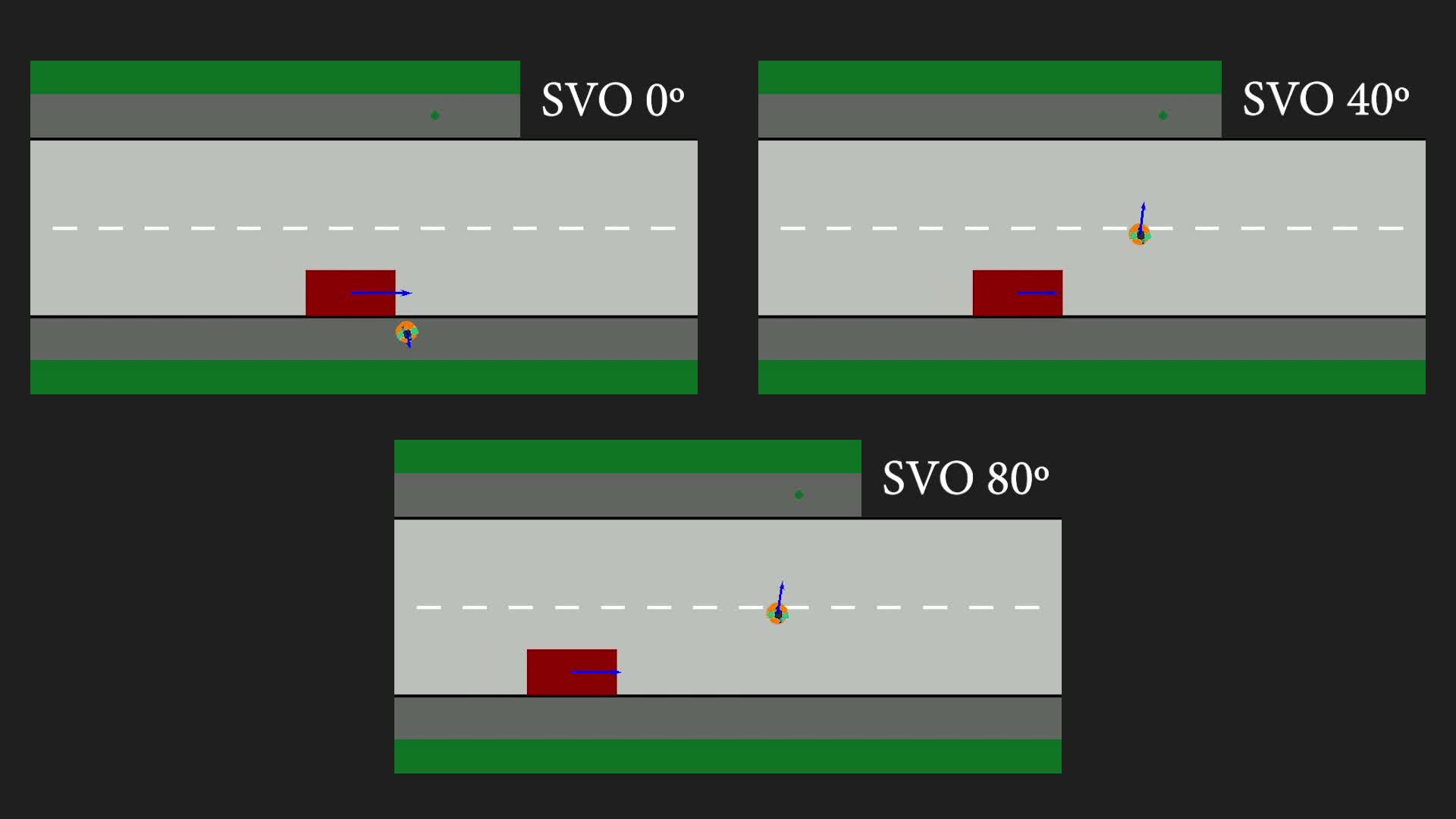
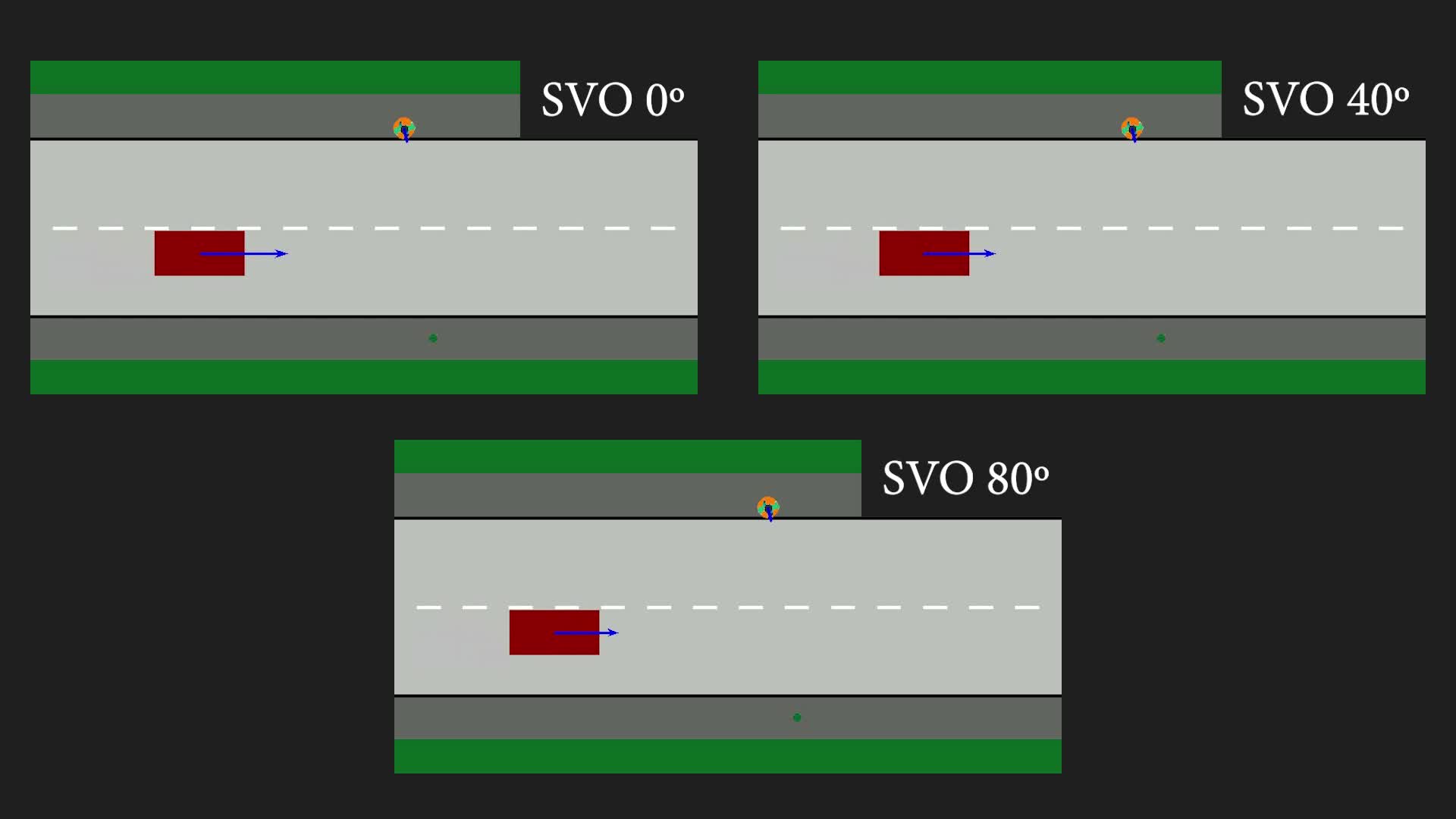
As Autonomous Vehicles (AV) are becoming a reality, the design of efficient motion control algorithms will have to deal with the unpredictable and interactive nature of other road users. Current AV motion planning algorithms suffer from the freezing robot problem, as they often tend to overestimate collision risks. To tackle this problem and design AV that behave human-like, we integrate a concept from Psychology called Social Value Orientation into the Reinforcement Learning (RL) framework. The addition of a social term in the reward function design allows us to tune the AV behaviour towards the pedestrian from a more reckless to an extremely prudent one. We train the vehicle agent with a state of the art RL algorithm and show that Social Value Orientation is an effective tool to obtain pro-social AV behaviour.
Publication
Human-centric Autonomous Driving in an AV-Pedestrian Interactive Environment Using SVO by Zhiying Leng, Jiaying Chen, Hubert P. H. Shum, Frederick W. B. Li and Xiaohui Liang in 2022
Proceedings of the 2021 IEEE International Conference on Human-Machine Systems (ICHMS)
Links and Downloads




YouTube
Similar Research