Kinect Posture Reconstruction based on a Local Mixture of Gaussian Process Models

Abstract
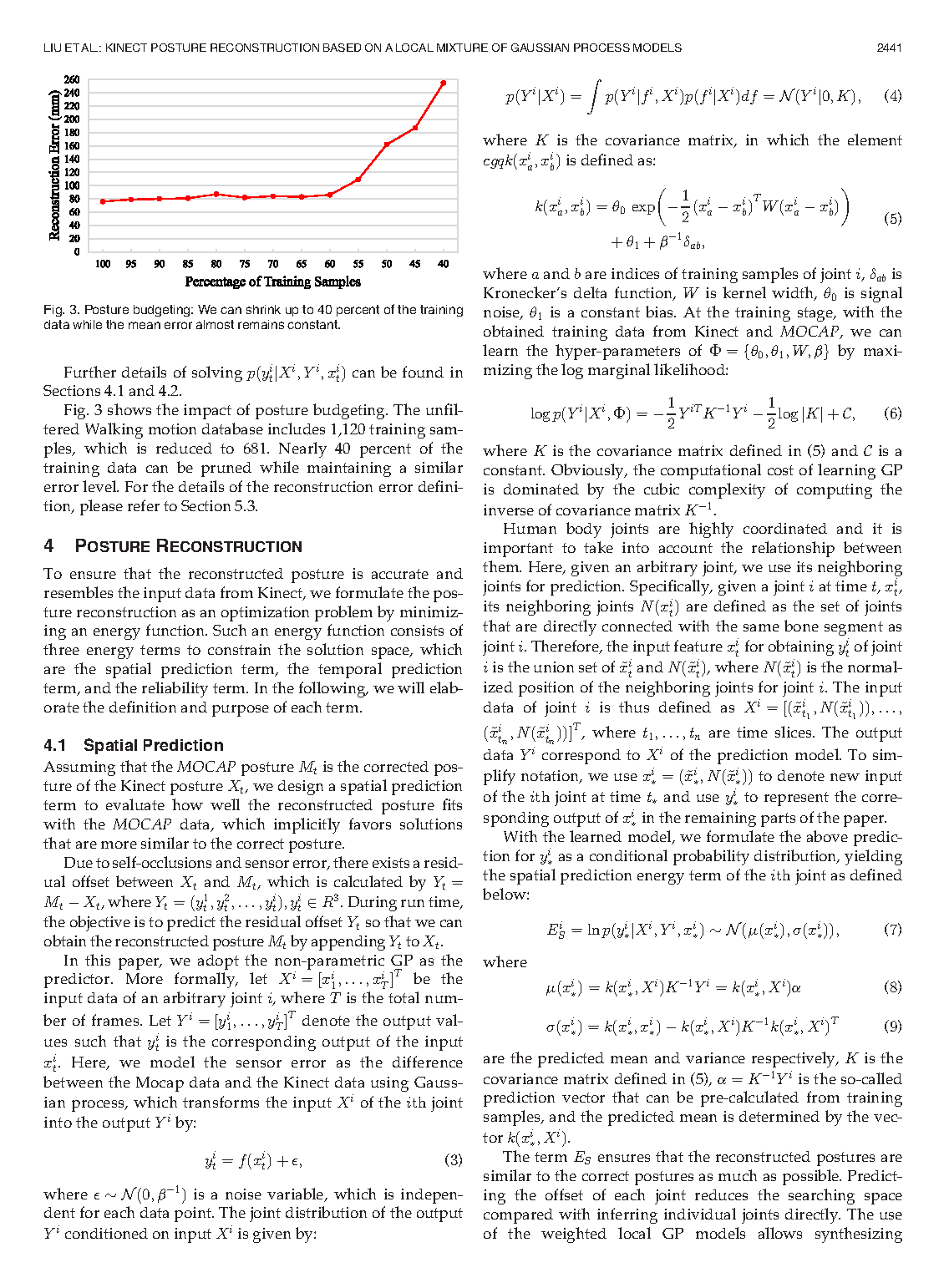
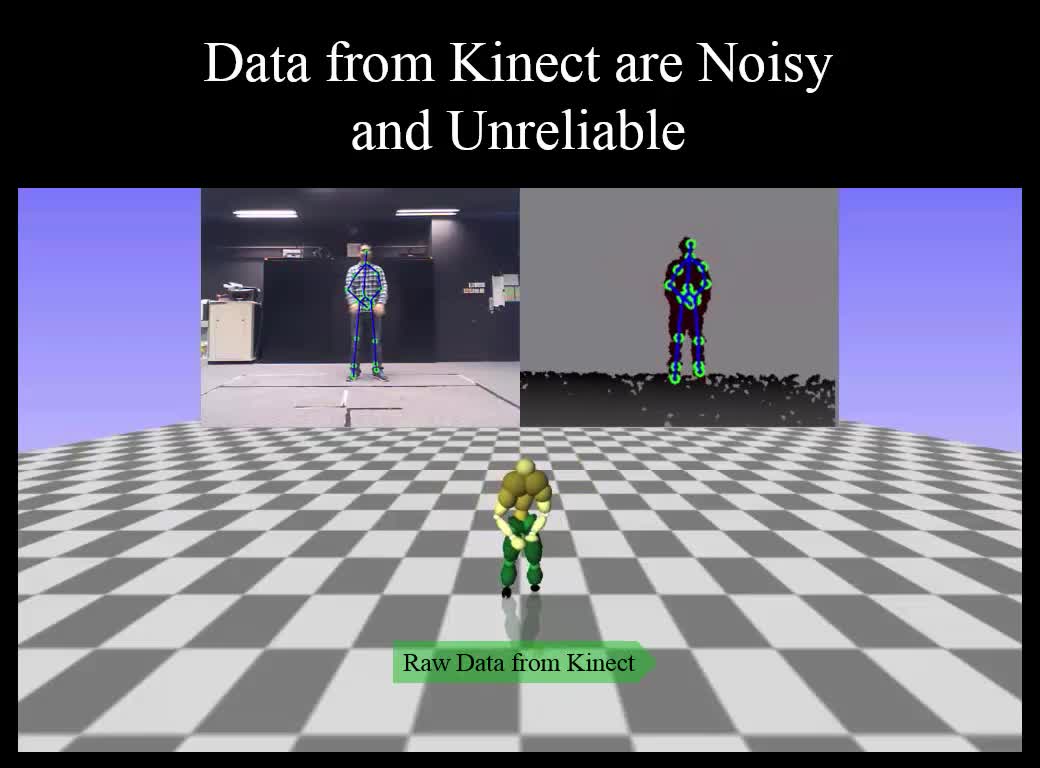
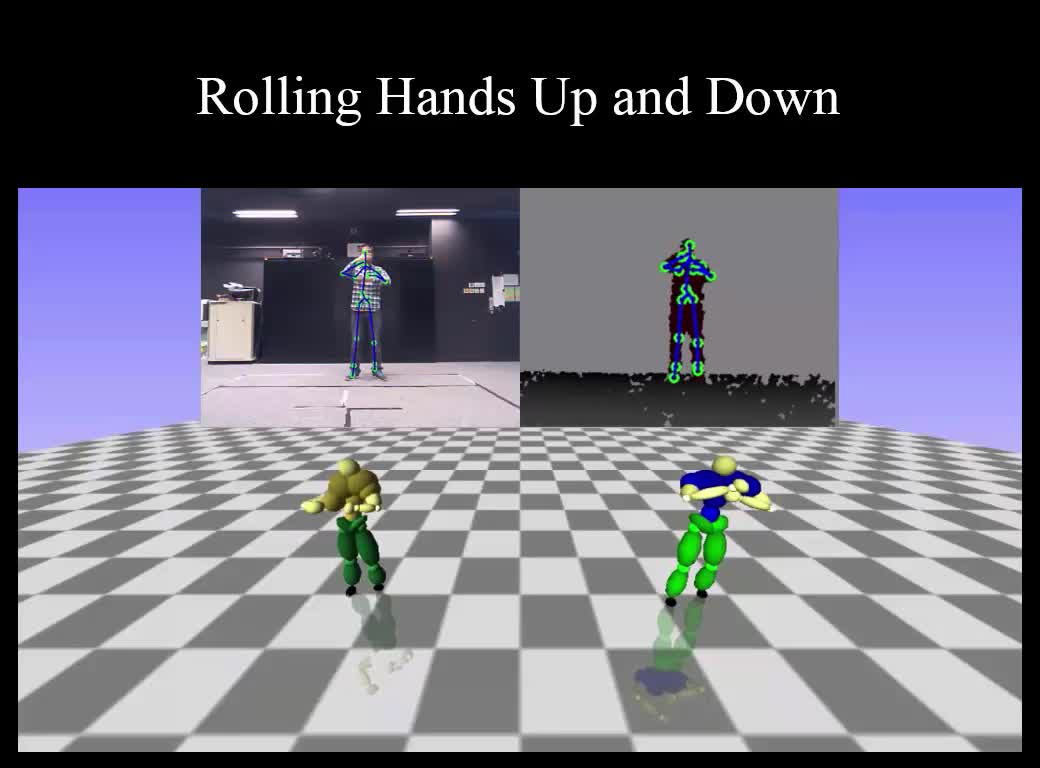
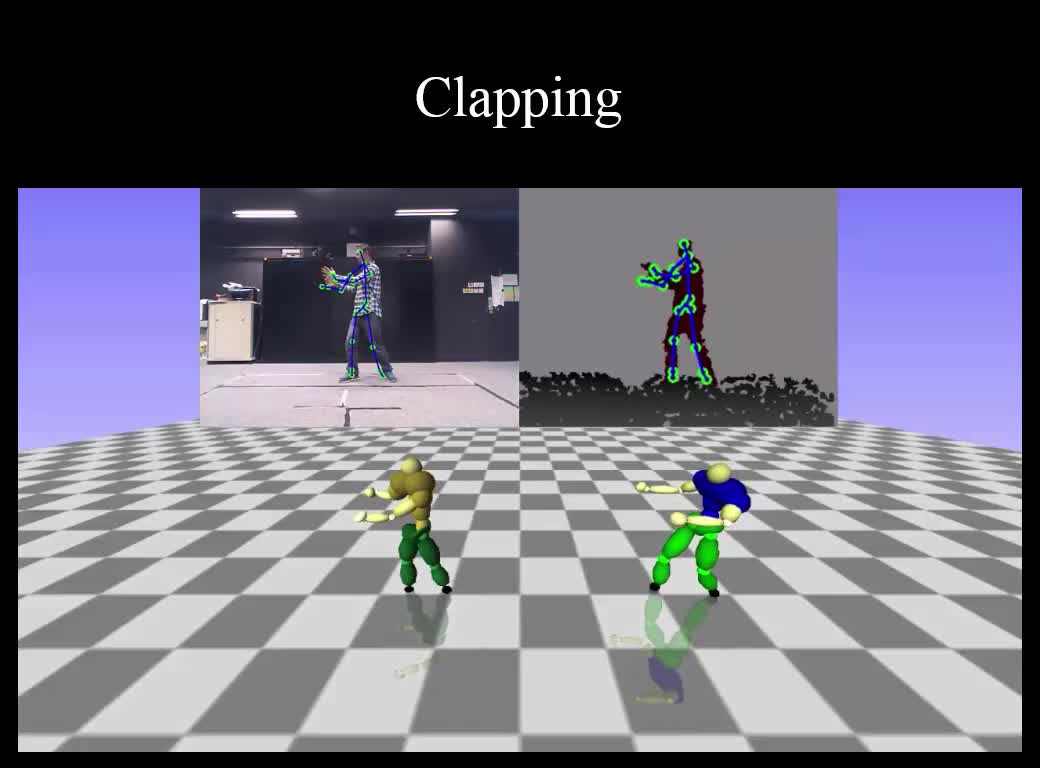
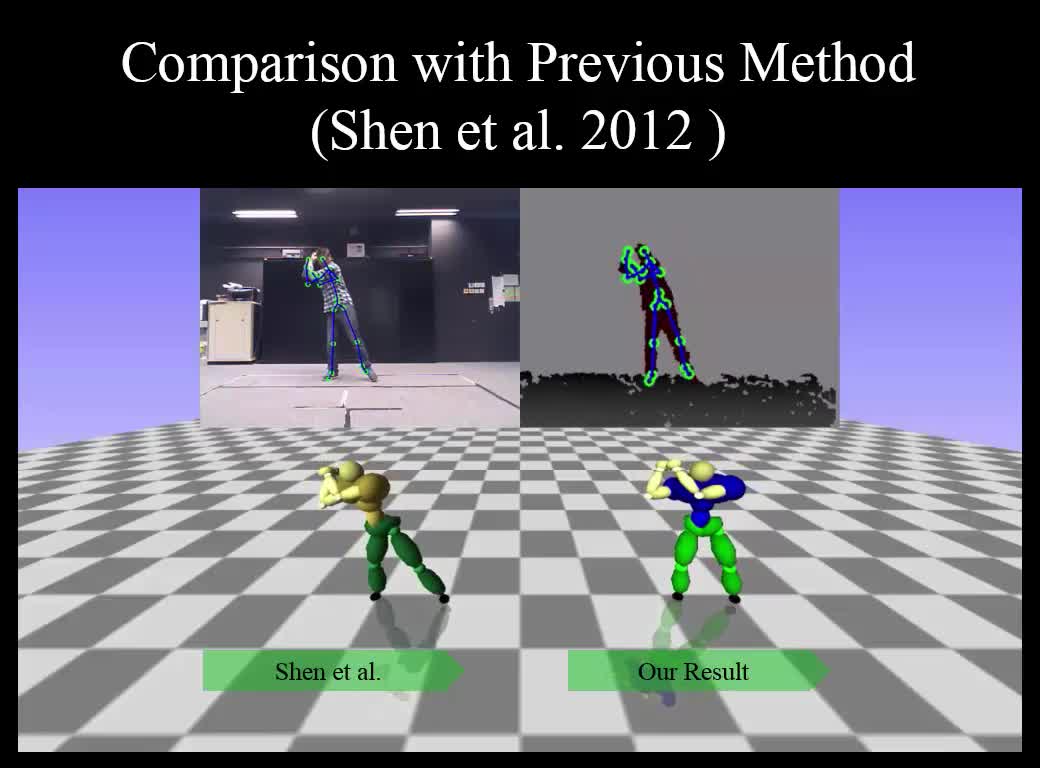
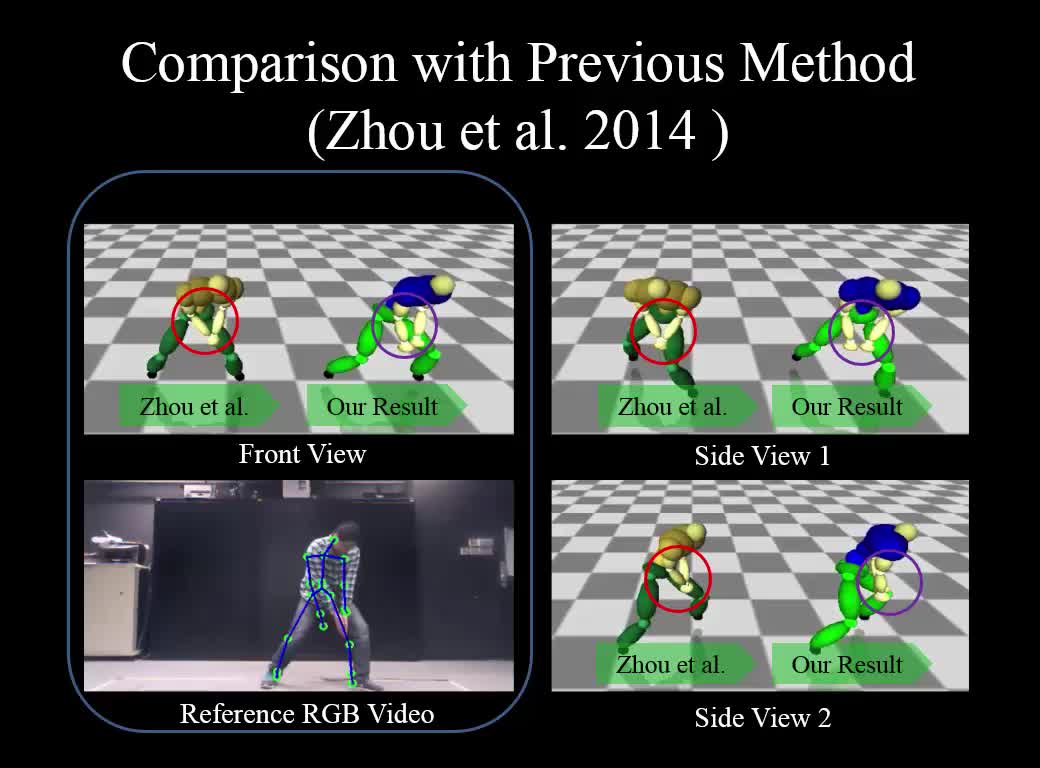
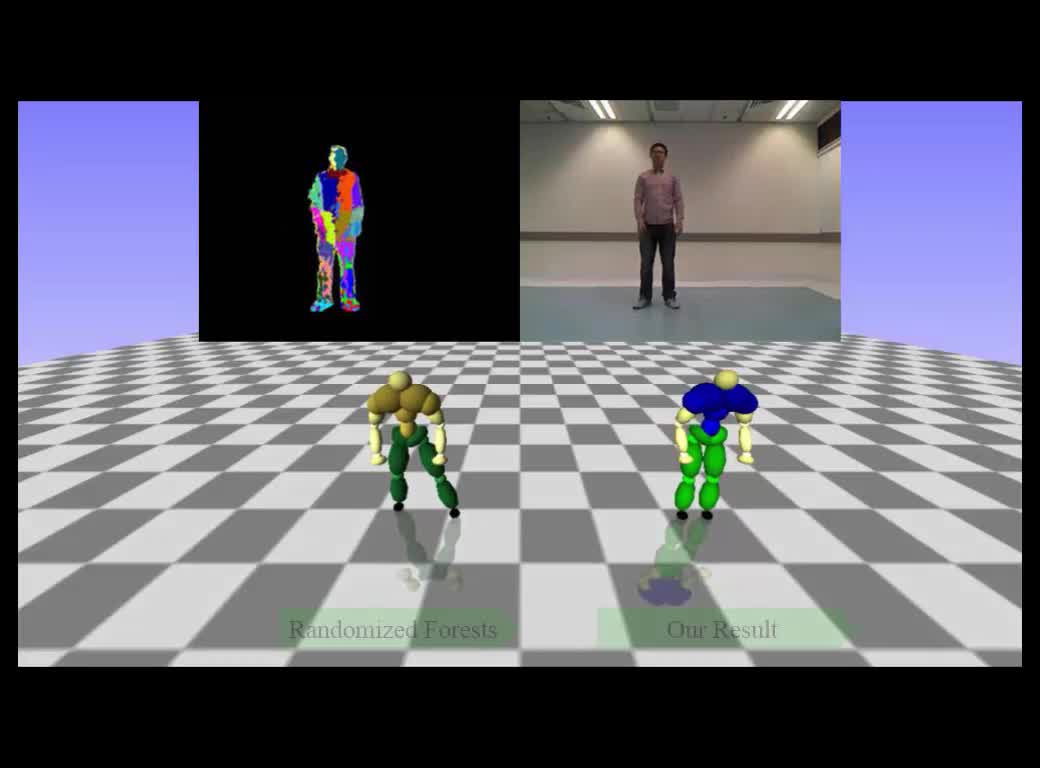
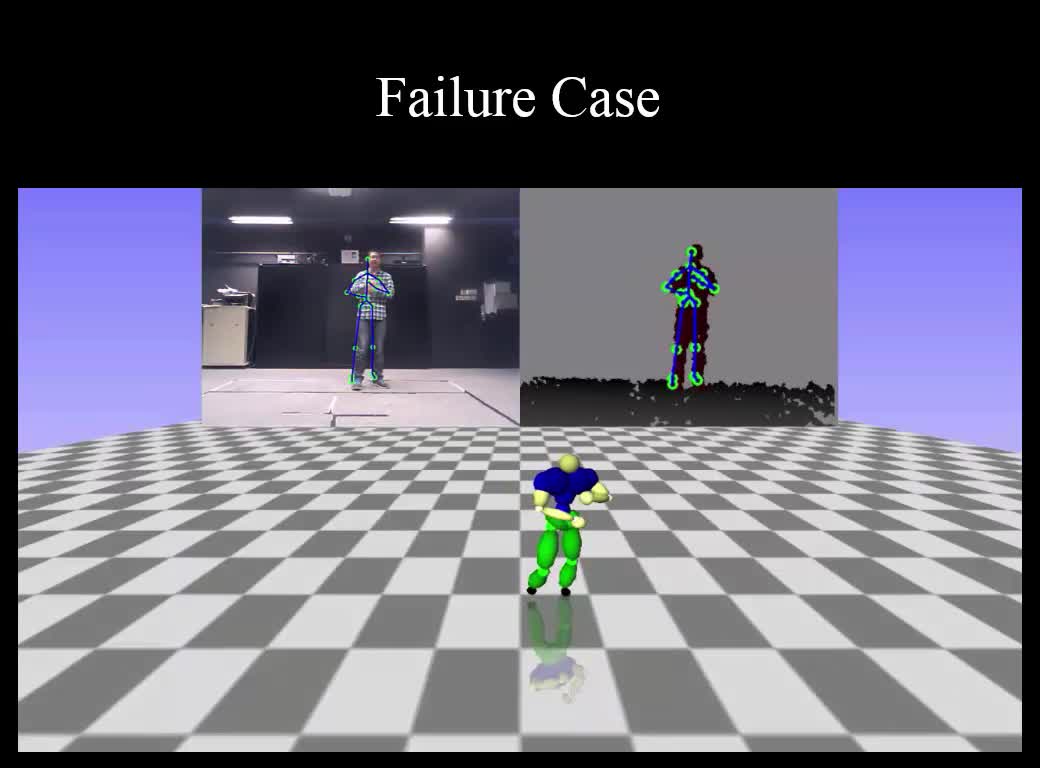
Depth sensor based 3D human motion estimation hardware such as Kinect has made interactive applications more popular recently. However, it is still challenging to accurately recognize postures from a single depth camera due to the inherently noisy data derived from depth images and self-occluding action performed by the user. In this paper, we propose a new real-time probabilistic framework to enhance the accuracy of live captured postures that belong to one of the action classes in the database. We adopt the Gaussian Process model as a prior to leverage the position data obtained from Kinect and marker-based motion capture system. We also incorporate a temporal consistency term into the optimization framework to constrain the velocity variations between successive frames. To ensure that the reconstructed posture resembles the accurate parts of the observed posture, we embed a set of joint reliability measurements into the optimization framework. A major drawback of Gaussian Process is its cubic learning complexity when dealing with a large database due to the inverse of a covariance matrix. To solve the problem, we propose a new method based on a local mixture of Gaussian Processes, in which Gaussian Processes are defined in local regions of the state space. Due to the significantly decreased sample size in each local Gaussian Process, the learning time is greatly reduced. At the same time, the prediction speed is enhanced as the weighted mean prediction for a given sample is determined by the nearby local models only. Our system also allows incrementally updating a specific local Gaussian Process in real time, which enhances the likelihood of adapting to run-time postures that are different from those in the database. Experimental results demonstrate that our system can generate high quality postures even under severe self-occlusion situations, which is beneficial for real-time applications such as motion-based gaming and sport training.
Publication
Kinect Posture Reconstruction based on a Local Mixture of Gaussian Process Models by Zhiguang Liu, Howard Leung, Liuyang Zhou, Franck Multon and Hubert P. H. Shum in 2016
IEEE Transactions on Visualization and Computer Graphics (TVCG)
Links and Downloads







YouTube
Similar Research